27. Schelling Model with JAX#
27.1. Overview#
In the previous lecture, we rewrote our Schelling model using NumPy arrays and functions.
In this lecture, we explore JAX, a library developed by Google for high-performance numerical computing.
JAX offers several powerful features, including automatic GPU/TPU acceleration and just-in-time compilation.
JAX is heavily used for AI workflows but we repurpose it to work with our simulation.
Let’s start with some imports:
import matplotlib.pyplot as plt
import numpy as np
import jax
import jax.numpy as jnp
from jax import random, jit
from functools import partial
from typing import NamedTuple
import time
27.2. Setup#
We use the same parameters as before. To keep our functions pure, we pack all
parameters into a NamedTuple that gets passed to functions that need them:
class Params(NamedTuple):
num_of_type_0: int = 1000 # number of agents of type 0 (orange)
num_of_type_1: int = 1000 # number of agents of type 1 (green)
num_neighbors: int = 10 # number of agents regarded as neighbors
max_other_type: int = 6 # max number of different-type neighbors tolerated
params = Params()
Here’s our initialization function. Note that we use jax.random instead of
numpy.random — we pass a key argument to random.uniform, making random
generation deterministic and reproducible:
def initialize_state(key, params):
"""
Initialize agent locations and types.
"""
num_of_type_0, num_of_type_1 = params.num_of_type_0, params.num_of_type_1
n = num_of_type_0 + num_of_type_1
locations = random.uniform(key, (n, 2))
types = jnp.concatenate([jnp.zeros(num_of_type_0, dtype=int),
jnp.ones(num_of_type_1, dtype=int)])
return locations, types
27.3. JAX-Compiled Functions#
Now let’s rewrite our core functions for JAX.
We use jit to compile functions for faster execution.
@partial(jit, static_argnames=('params',))
def is_happy(loc, agent_idx, locations, types, params):
" True if an agent at loc has at most max_other_type different-type neighbors. "
# Squared distances from loc to every agent
distances = jnp.sum((loc - locations)**2, axis=1)
distances = distances.at[agent_idx].set(jnp.inf) # exclude self
# top_k finds the k smallest distances in O(n) (we negate to use top_k)
_, neighbors = jax.lax.top_k(-distances, params.num_neighbors)
num_other = jnp.sum(types[neighbors] != types[agent_idx])
return num_other <= params.max_other_type
Compared to the NumPy version, there are a few differences worth noting.
We use jax.lax.top_k instead of argsort to find nearest neighbors — this
is \(O(n)\) rather than \(O(n \log n)\).
We use .at[].set() rather than direct indexing to exclude the agent from its
own neighbor set, since JAX arrays are immutable.
The function takes loc as an explicit argument rather than looking it up
from the arrays, so we can test hypothetical locations without modifying the
locations array.
The next function finds a location where a given agent would be happy.
Rather than updating the locations array on each iteration, it tests
candidate locations directly and returns only the final location.
@partial(jit, static_argnames=('params',))
def move_agent(i, locations, types, key, params, max_attempts=10_000):
"""
Find a location where agent i is happy.
Returns the new location and updated random key. The calling code
is responsible for updating the locations array if the agent moved.
"""
loc = locations[i, :]
# Continue while under max_attempts and not yet happy
def while_test(state):
loc, key, attempts = state
return (attempts < max_attempts) & ~is_happy(loc, i, locations, types, params)
# Draw a new random location
def update(state):
_, key, attempts = state
key, subkey = random.split(key)
new_loc = random.uniform(subkey, 2)
return new_loc, key, attempts + 1
final_loc, key, _ = jax.lax.while_loop(while_test, update, (loc, key, 0))
return final_loc, key
Here jax.lax.while_loop calls update repeatedly until while_test returns False.
27.4. The Simulation#
def simulation_loop(locations, types, key, params, max_iter):
"""
Run the simulation loop until convergence or max iterations.
"""
n = params.num_of_type_0 + params.num_of_type_1
converged = False
for iteration in range(1, max_iter + 1):
print(f'Entering iteration {iteration}')
someone_moved = False
for i in range(n):
if not is_happy(locations[i], i, locations, types, params):
new_loc, key = move_agent(i, locations, types, key, params)
locations = locations.at[i, :].set(new_loc)
someone_moved = True
if not someone_moved:
converged = True
break
return locations, iteration, converged, key
def run_simulation(params, max_iter=100_000, seed=1234):
"""
Run the Schelling simulation using JAX.
"""
key = random.key(seed)
key, init_key = random.split(key)
locations, types = initialize_state(init_key, params)
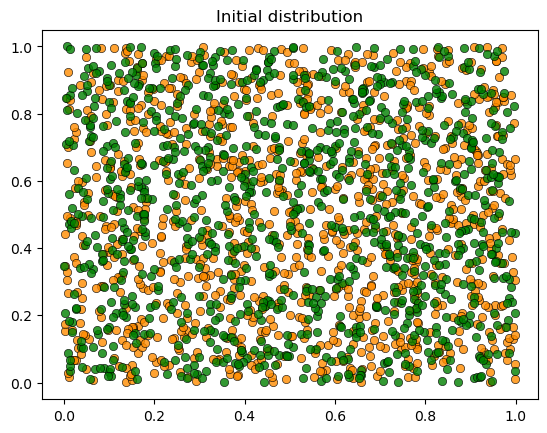
plot_distribution(locations, types, 'Initial distribution')
start_time = time.time()
locations, iteration, converged, key = simulation_loop(locations, types, key, params, max_iter)
elapsed = time.time() - start_time
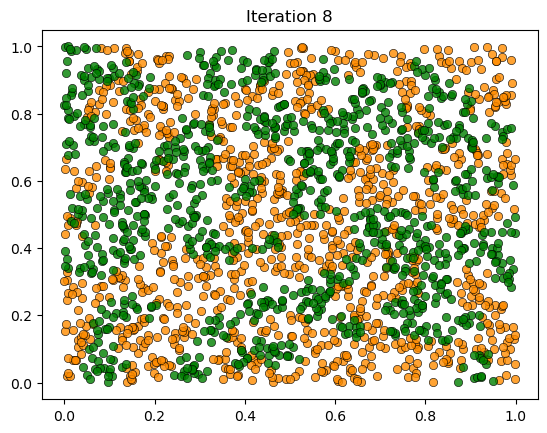
plot_distribution(locations, types, f'Iteration {iteration}')
if converged:
print(f'Converged in {elapsed:.2f} seconds after {iteration} iterations.')
else:
print('Hit iteration bound and terminated.')
return locations, types
The simulation loop is similar to the NumPy version: it cycles through agents, checks each one for happiness, and moves the unhappy ones.
27.5. Results#
JAX compiles functions the first time they’re called. Let’s warm them up before timing the simulation:
key = random.key(42)
key, init_key = random.split(key)
test_locations, test_types = initialize_state(init_key, params)
_ = is_happy(test_locations[0], 0, test_locations, test_types, params)
key, subkey = random.split(key)
_, _ = move_agent(0, test_locations, test_types, subkey, params)
print("JAX functions compiled and ready!")
JAX functions compiled and ready!
Now let’s run the simulation:
locations, types = run_simulation(params)
Entering iteration 1
Entering iteration 2
Entering iteration 3
Entering iteration 4
Entering iteration 5
Entering iteration 6
Entering iteration 7
Entering iteration 8
Converged in 13.98 seconds after 8 iterations.
27.6. Limitations of This Approach#
While this lecture demonstrated JAX syntax and concepts, the algorithm itself doesn’t fully leverage JAX’s parallel capabilities. The original Schelling algorithm has inherent sequential dependencies:
Agents update one at a time
Each agent’s move changes the state for subsequent agents
The “move until happy” while loop has unpredictable length
These characteristics don’t map well to parallel hardware like GPUs, which excel at performing the same operation on many data points simultaneously.
In the next lecture, we’ll restructure the algorithm to better leverage JAX’s parallel capabilities.